Knowledge representation and reasoning under uncertainty and
robotic applications
Aim:
The aim of our project is the development of a hybrid knowledge base and
inference mechanism working with incomplete and uncertain information.
Such a representation tool will be used for a design of an incomplete and
uncertain model of the relevant part of reality of a cognitive robotic
system. The proposed hybrid knowledge base will consist of
(1) graded literal implication of the form: (h1 ∨
... ∨ hn ← b1 & ... &
bm, c), where hi, bj are
literals and c is a truth degree of the implication; and of
(2) explicit database atoms with associated hidden Markov models.
By rules of the type (1), we shall represent general common-sense knowledge,
while by atoms of the type (2) we shall model training data and estimate
unknown testing ones, which will be a suitable means of learning skills.As
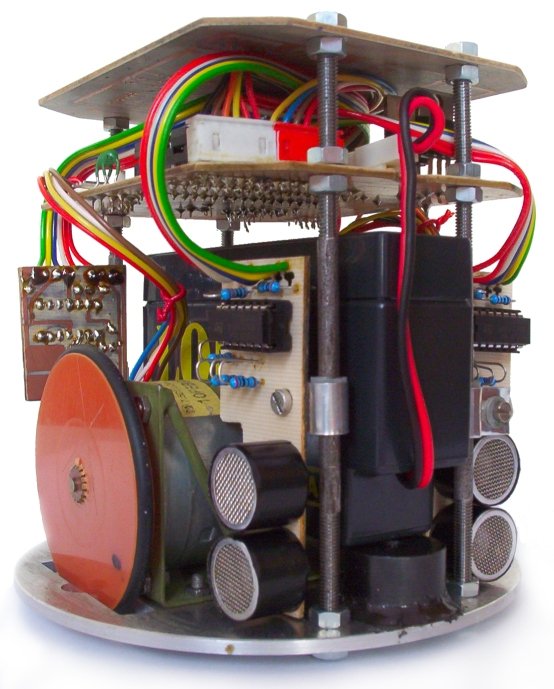
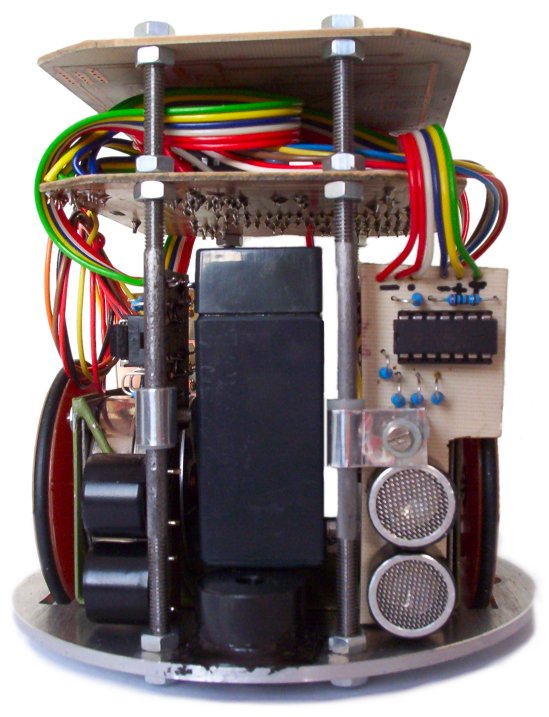
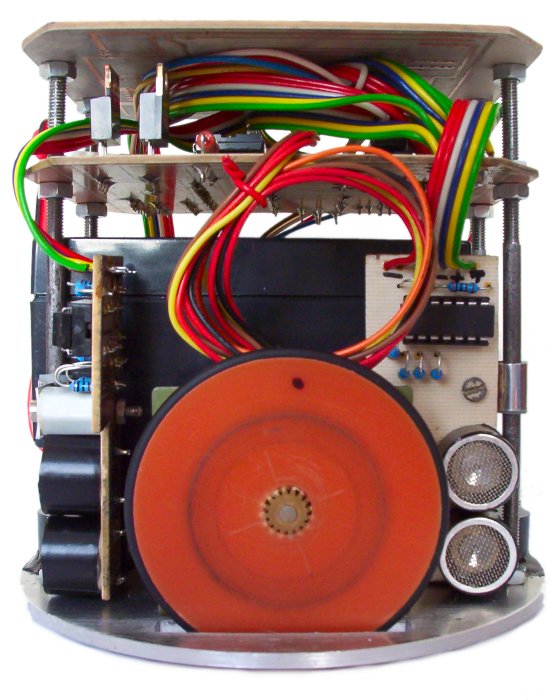
to the robotic applications we firstly implement our representation tool
into a robotic mouse constructed at the University of Trencin, see the
following figures (click for details):
 |
 |
 |
 |
| front-side view |
front view |
side view |
bottom view |
This mouse is able to travel in mazes of the grid form and search the shortest
and fastest paths between given points. Its perception is based on an ultrasound
sonar system and the inner model of a maze is simply stored in a matrix,
which causes the limitation of maze form only on a grid. Using our representation
tool, we will be able to extend exploring and searching capabilities of
the mouse to an arbitrary surface maze. We also construct a country model
of robotic explorer, which will be able to overcome easier unevennesses
in the field. Its perception subsystem will be based on a (infrared) digital
camera supported by a sonar system for measurement of distances. By the
proposed representation tool, we implement the cognitiveness into the explorer.
To both the robotic systems, we supplement a voice control unit based on
speech recognition techniques.
Methods:
In the development of a hybrid representation tool, we shall use techniques
of disjunctive and multivalued logic programming: especially bottom-up
computations based on the hyperresolution operator Cp, the query-answering
procedure based on ULSLD resolution, and their suitable generalisations.
The model semantics will be proposed by means of characteristic fuzzy disjunctive
L-models. Learning models from data and speech recognition will developed
on the basis of hidden Markov models. In sonar and camera vision, we recognise
several levels of processing. In preprocessing, we will apply the standard
techniques as in/de-creasing of contrast, focusing, blurring, segmentation.
The classification of objects will be proposed by fuzzy logic methods.
Plan:
At the first stage:
-
we generalise fuzzy disjunctive logic programming to residuated lattices
(Guller);
-
implement a speech recognition and language understanding unit into the
robotic mouse (Nagy);
-
propose a hybrid representation and inference framework as roughly described
above (Nagy, Guller);
-
design and construct the chassis and propulsion (step motors) of the country
explorer (Ceska, Janosik, Zervan, Guller);
-
develop the software and connect the hardware for vision preprocessing
on the platform of DSP processors (Ceska, Zervan, Guller).
At the second stage:
-
we implement the hybrid representation tool into the robotic mouse (Zervan,
Nagy, Guller);
-
design and construct electronic control and power systems for the country
explorer (Ceska, Janosik);
-
propose the classification of objects on the basis of fuzzy logics and
develop the software (Ceska, Zervan, Guller);
At the third stage:
-
we implement the hybrid representation tool into the explorer (Zervan,
Nagy, Guller);
-
implement a speech recognition and language understanding unit into the
explorer (Nagy);
-
mount the vision and sonar system on the explorer (Ceska, Janosik); make
the calibration of vision system (Ceska, Zervan, Guller);
-
make tests in the field (Ceska, Janosik, Nagy, Zervan, Guller).